CANmod.gps:
GPS-to-CAN with 3D Inertial Sensor and UDR

概要:
CANmod.gpsはスタンドアロンのGPS-to-CANモジュールです。
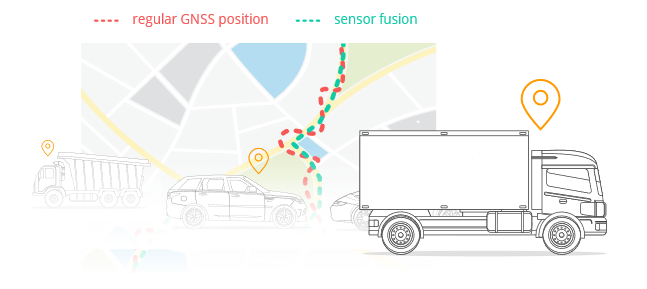
GNSS位置と3D慣性データ(ジャイロスコープと加速度計を使用)を生成し、設定可能なCANバスフレームを介して出力します。このモジュールは「Untethered Dead Reckoning」をサポートしています。つまり、GNSS 信号が完全に失われた場合でも、モジュールは IMU ベースの予測機能を通じて継続的な測位を提供できます (外部入力は必要ありません)。
このモジュールは、車両ネットワークやCANハードウェアなど、あらゆるCANバスと統合することができます。たとえば、CANedgeのプラグ&プレイ のアドオン・モジュールとして使用できます。

PLUG & PLAY
・スタンドアロン – PCは不要
・GNSS/IMU データを追加する
ため任意の CAN バスと統合
・DBC含む。
COMPACT
・サイズは7 x 2 x 5 cm、70g
・Aluエンクロージャ、4つのLED
・DB9 経由で 5-26 V DC
・設定/ファームウェア用のUSB
USE GLOBALLY
・1 Hz GNSS 位置
・バッテリーバックアップによる
ホットスタート
・GPS, ガリレオ, BeiDou, グロナス
INERTIAL DATA
・内蔵ジャイロスコープ
(roll, pitch, yaw)
・加速度計(X、Y、Z)、100 Hz周波数
SENSOR FUSION
・GNSS/IMUのセンサ融合による
高精度位置・姿勢データ
CONFIGURABLE
・JSON の設定と GUI を使用して
CAN ID、ビットレート、
データ周波数、ジオフェンスを設定
GNSS/IMUデータをCANバスシステムに簡単に追加
CANmod.gpsを使用すると、Canバスに位置や3D慣性データを簡単に追加できます。
・高速CANバス(2.0A、2.0B)との互換性
・CAN ID、ビットレート、およびメッセージの周波数を完全に設定
・標準の DB9 アダプター・ケーブルを介して 5~26 V DC で電力供給
・任意のCANインターフェイス/ロガーを介してデータの記録が可能
・CANedgeのアドオンとして使用可能
・人間が読める形式に簡単にデコードするためのDBCファイル